Queremos agradecer a PC Factory S.A., y especialmente a su gerente general, Rodrigo Arriagada, por la donación al proyecto de un computador de última generación (AMD Ryzen Threadripper de 24 núcleos, disipador enfriado por agua, placa madre MSI TRX40 Pro, memoria, fuente de poder y disco) para la simulación de las señales de control de la electrónica del respirador.
Este tremendo aporte nos ayuda simular en tiempo real las variables de control, sin necesidad de estar conectados a un pulmón de pruebas y optimizar la sintonización de los controladores (mezcla, canal de inspiración y canal de espiración) del respirador.
IMPORTANTE : El contenido de este post es el resultado de la comprensión del funcionamiento del sistema respiratorio y algunos principios de ventilación mecánica durante las últimas 3 semanas. Es importante destacar el gran aporte que significaron los datos entregados por los médicos, a quienes hacemos referencia en la Reseña. Los posts siguientes con el tag “Simulación”, serán avances incrementales.
La simulación de los sistemas de control sobre una representación matemática del cuerpo humano, nos entrega una herramienta fundamental para minimizar el proceso de iteración del diseño.
En base a este modelo, ha sido posible dimensionar las especificaciones de válvulas y sensores, lo que permitirá evaluar el efecto que otras decisiones pueden tener sobre el funcionamiento de los sistemas de control.
Modelo del Cuerpo Humano con Asistencia Mecánica Completa
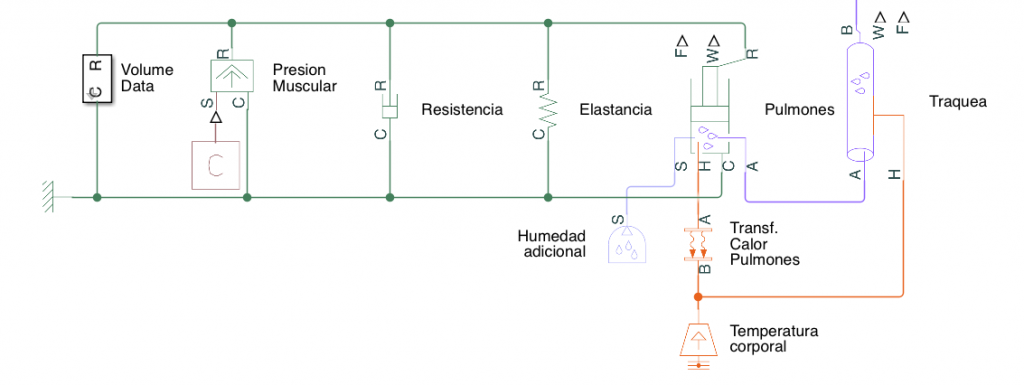
En medicina intensiva, se utiliza la ecuación del movimiento del sistema respiratorio para representar matemáticamente el funcionamiento de dicho sistema. En simples palabras, es una ecuación que equilibra presiones y flujo. Las características físicas de los tejidos pulmonares y las vías aéreas del paciente, se representan en base a dos parámetros denominados resistencia y elastancia. Ellas, en conjunto con la presión muscular, que permite el movimiento del diafragma, nos describen el funcionamiento del Sistema Respiratorio Humano ( Figura 1 ). El modelo fue tomado de un ejemplo de Simulink para sistemas físicos de aire húmedo.
Figura 1. Funcionamiento del Sistema Respiratorio Humano.
Básicamente, el Sistema Respiratorio se modela como un pistón, el cual, por un lado (izquierdo) tiene toda la mecánica del cuerpo para generar la diferencia de presión para hacer fluir el aire. La fuerza del movimiento muscular está representada por la carga C, que en el caso de un paciente sedado, es igual a 0.
En el lado izquierdo está modelada la tráquea por donde ingresa el flujo de aire al pistón (pulmones), donde la resistencia y elastancia, representadas por un amortiguador (oposición a la velocidad) y un resorte (oposición a la posición), producen la mecánica de espiración. El modelo también considera las mangueras que conectan el paciente de con el ventilador.
Para un flujo constante, en un paciente sedado, el movimiento respiratorio del modelo se ve de la siguiente forma, detallado en la Figura 2.
Figura 2. Resultado simulación del Sistema Respiratorio para paciente entubado. Flujo de entrada constante 30 L/min.
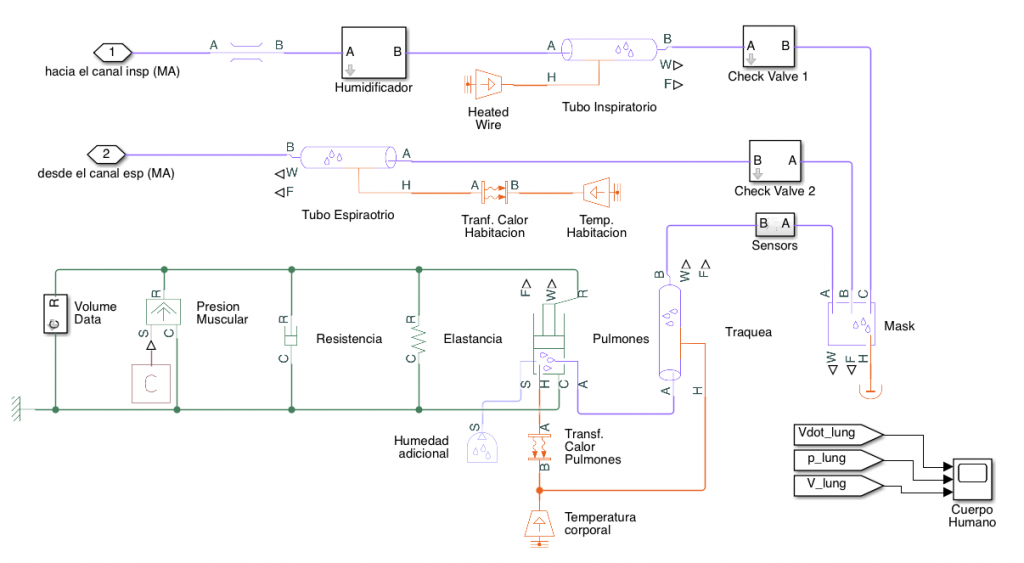
El modelo de cuerpo humano entubado, considerando mangueras e intercambio de calor y humedad con el ambiente queda de la siguiente forma, detallada en la Figura 3.
Figura 3. Modelo de Cuerpo Humano entubado.
Estanque de Entrada – Control de Presión y FiO2%
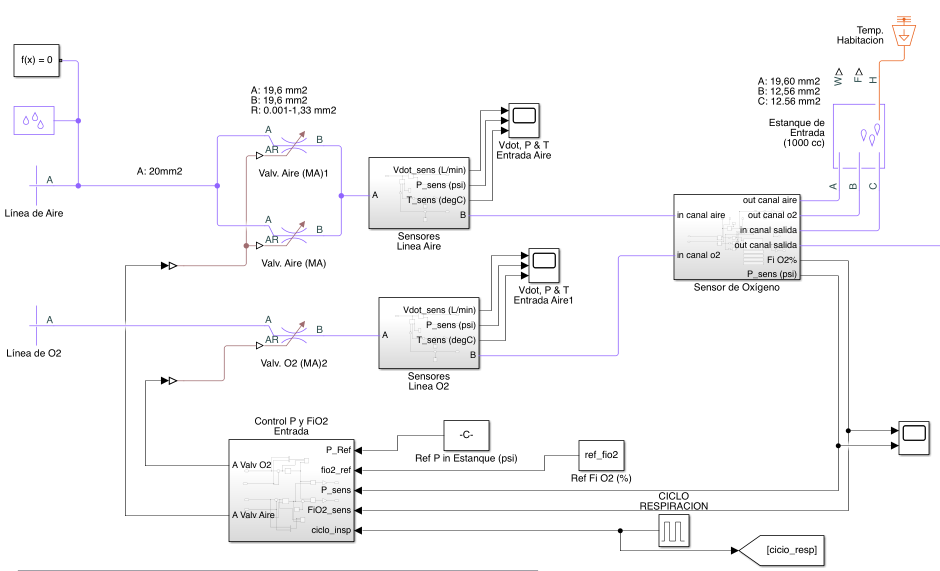
Este bloque, fue simulado considerando una línea de entrada de aire y oxígeno para generar la mezcla que se indique en el tratamiento de ventilación. La presión de entrada, se consideró en 55 [psi] para cada una, pero las válvulas de control operan entre 1 y 1.7 [bar] (alrededor de 14.5 y 24.6[psi]), por lo que será necesario instalar un regulador y un sensor de presión en la entrada del equipo para asegurar esta condición de operación. ( Figura 4 ).
Figura 4. Modelo de las lineas de entrada, cuerpo de válvulas, el estaque y sistema de control de presión y FiO2%
A continuación, se diseñó el controlador de carga para que la presión en el tanque estuviera en el rango de operación, en torno a los 20 psi y se modeló el sensor de oxígeno para determinar la fracción de oxígeno en la inspiración (FiO2 %). ( Figura 5 – Figura 6).
Figura 5.Figura 6.
En la simulación, se configura una mezcla de 30% y luego se cambia la referencia a un 55%. La velocidad de cambio en la mezcla se debe a que el sistema conserva la presión en el estanque y solo ingresa más mezcla al estanque en la etapa inspiratoria, que es cuando se inyecta la mezcla al paciente. Durante la espiración, la válvula de salida del estanque debe permanecer cerrada, lo que impide al controlador llegar más rápido a la referencia. es importante mencionar que es posible mejorar la sintonización del controlador PID de la presión.
Control de Inspiración por Volumen/Flujo
El primer método de ventilación mecánica que se diseñó fue el Control por flujo. Éste método es similar al Control por volumen, en el que el médico debe configurar el volumen de mezcla con que necesita ventilar al paciente en [Litros], el período del ciclo respiratorio en [respiraciones/min] y la relación inspiración y espiración, como una fracción [I : E]. De de esta forma, se pude calcular el flujo en [L/min] con que se desea ventilar al paciente.
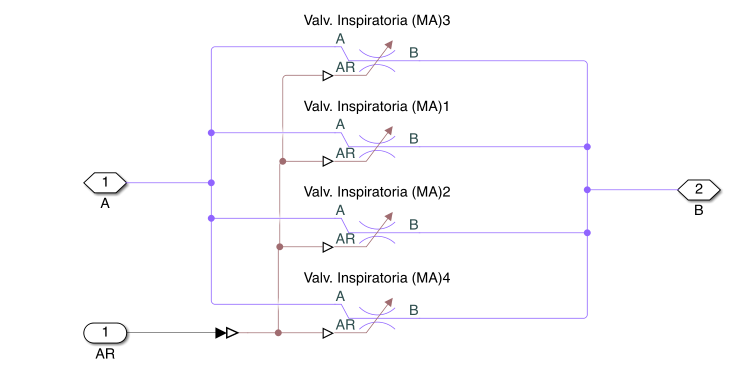
El control del flujo de inspiración lo realiza un cuerpo de válvulas proporcionales que tiene la capacidad de entregar más de 100 [L/min], la cual es accionada por un sistema de control sobre el flujo y la presión. ( Figura 7- Figura 8 ).
Figura 7. Modelo del sistema de control del canal de inspiraciónFigura 8. Modelo del cuerpo de válvulas del canal inspiratorio
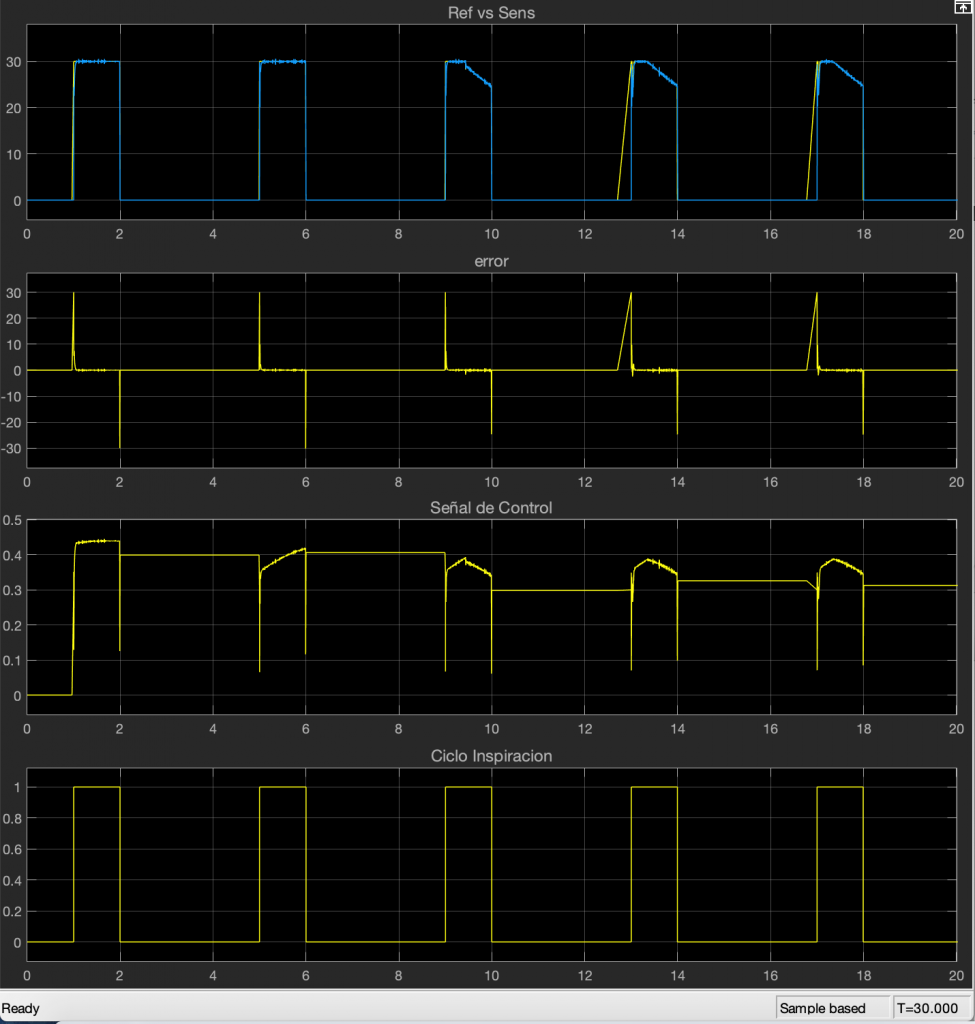
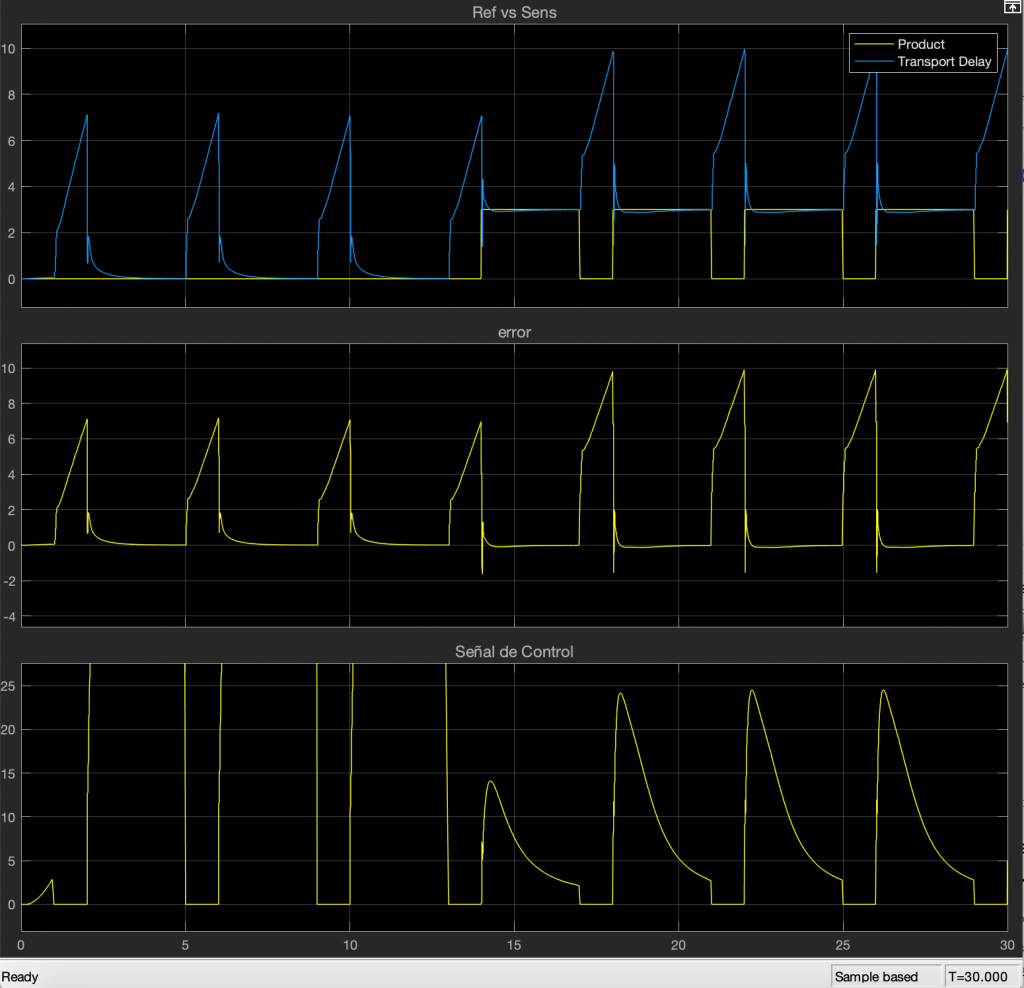
Este sistema de control, disminuye el flujo hacia el pulmón, cuando la presión llega al límite configurado por el médico. En el segundo 9 de la simulación, se cambia la presión límite. Se baja de 14 a 10 [cm H2O]. ( Figura 8 – Figura 9 )
Figura 8. Presión en el canal de inspiración y señales de controlFigura 9. Flujo en el canal de inspiración y señales de control
En este caso, la salida del controlador PIDde la presión realimenta la referencia de la señal de flujo, es decir, que si existe una diferencia entre la presión medida y la presión de referencia, ésta disminuirá la referencia del flujo, haciendo que el control de flujo haga bajar el flujo que entra al pulmón.
Control de Espiración
El control del Canal de Espiración consiste en permitir que los médicos puedan configurar una presión residual en los pulmones cuando el paciente termina de exhalar. Esta presión se llama PEEP y se fija como una referencia al sistema de control de la válvula de espiración.
Figura 10. Control de presión PEEP en el canal de espiración
En la simulación, se cambia la referencia de PEEP de 0 a 3 [cm H2O], en el segundo 14 de la simulación, donde la presión de salida converge muy rápido a la presión PEEP especificada. ( Figura 10 )
Modelo del Esfuerzo de Inspiración
Una especificación muy importante para evitar daños al pulmón durante la terapia de ventilación, es la detección de esfuerzos inspiratorios por parte del paciente, que corresponde al impulso del paciente por respirar por sus propios medios, mientras está conectado a ventilación mecánica. Cuando esto sucede durante al terapia por ventilador, se produce un fenómeno llamado Disincronía ( Figura 11 – Figura 12) , que, en simples palabras, ocurre cuando el paciente intenta inspirar pero el ventilador está en fase de espiración, o al revés.
Figura 11. Disincronía respiratoria producto del esfuerzo de inspiración del pacienteFigura 12. Deformación en las curvas de flujo y presión por disincronía respiratoria.
¿Qué sigue?
En esta línea de trabajo, los pasos a seguir en la modelación del sistema serían los siguientes :
Actualmente se está trabajando en un algoritmo de detección temprana de esfuerzo inspiratorio del paciente que permita sincronizar la frecuencia respiratoria y la relación I:E al esfuerzo del paciente, pensando en el mecanismo que ayudará a los médicos a despertar al paciente y de esta forma evitar el daño pulmonar que la disincronía puede causar.
Modelar el control por presión PCV.
Modelar el control semi asistido SIMV.
Modelar las características de los tubos y fittings seleccionados para la fabricación del prototipo y sintonizar los parámetros de los controladores PID bajo estas condiciones de operación.
¿Necesitas más información?
Para obtener información más detallada puedes escribirnos a respirador@yx.cl .